Robotics
6DOF Linear Trajectory, IK & FK
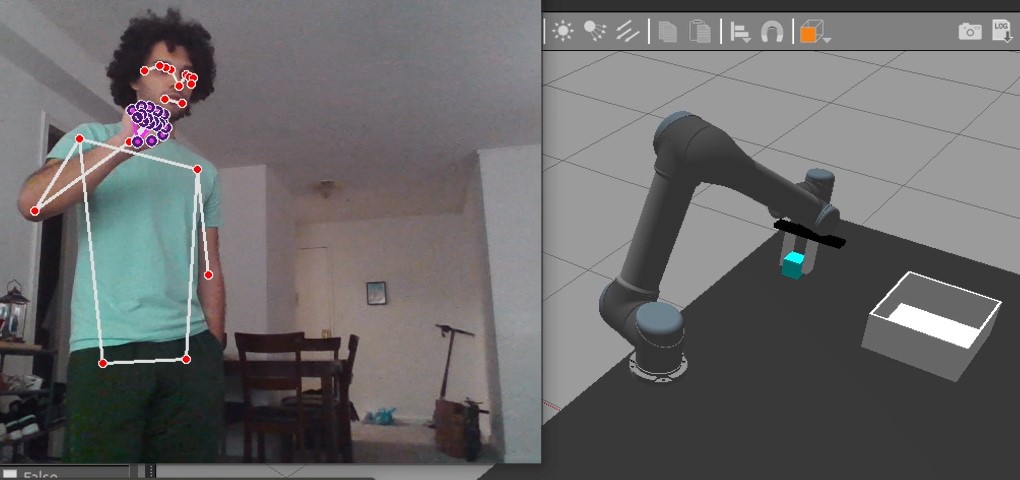
Linear trajectory generator using inverse and forward kinematics to maintain end-effector orientation while the Revyn Arm moves between positions.
View Project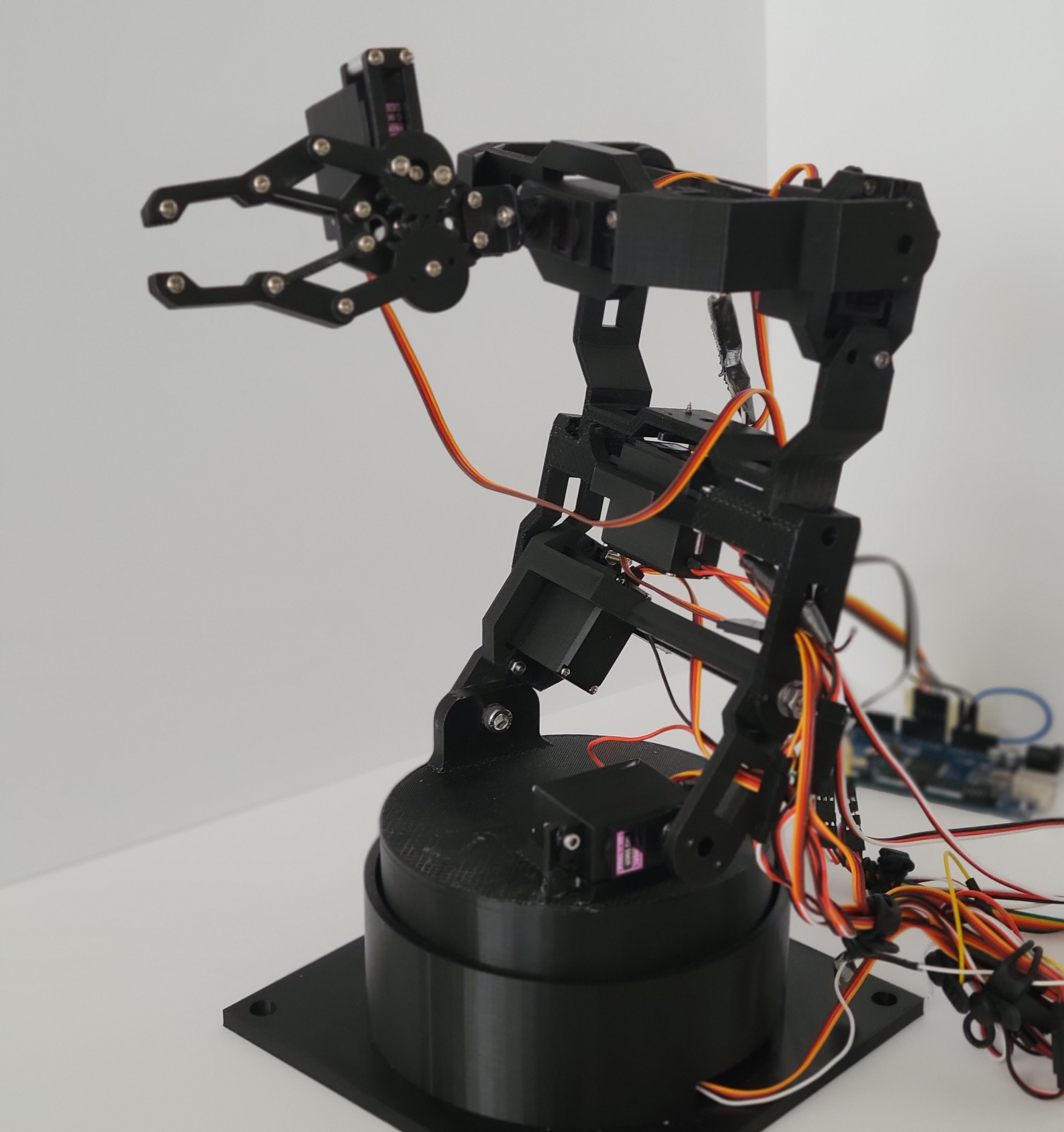
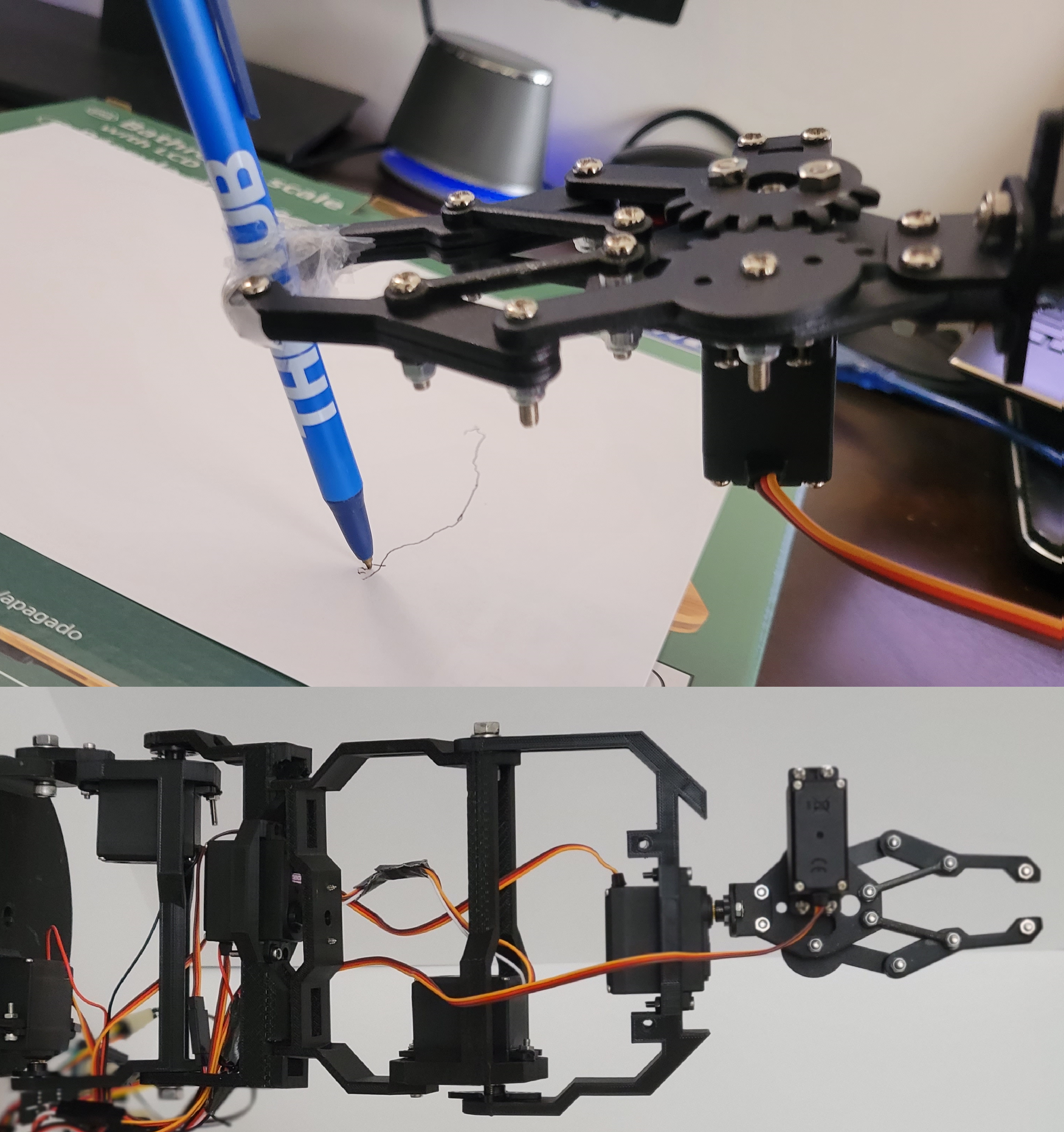
6DOF Robot Arm — Mechanical Design
Full design of the Revyn Arm: requirements, CAD in Fusion 360, electronics, 3D printing, assembly, and professional drawing packet.
View Project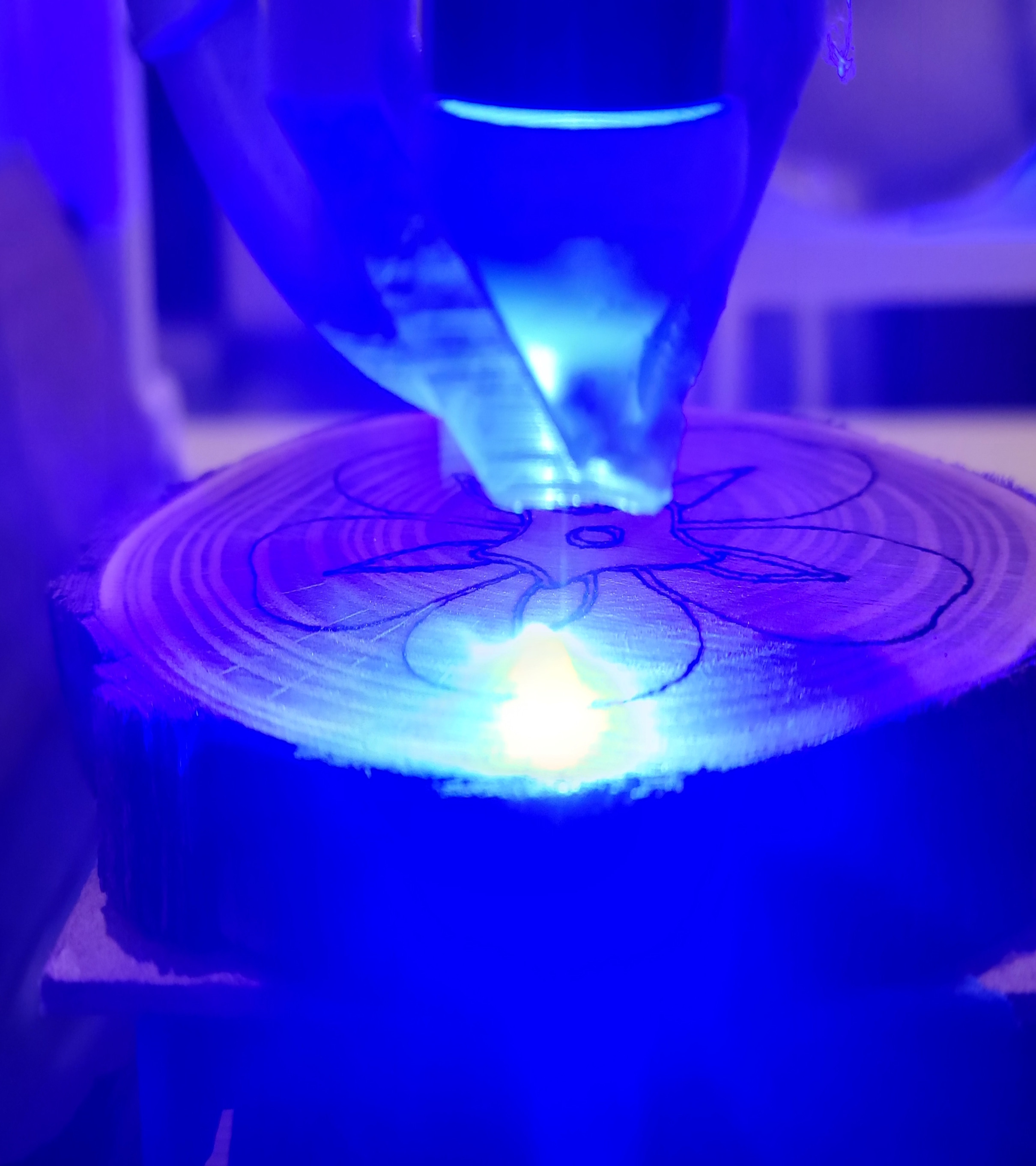
Custom CNC Laser Cutter/Engraver
Fully designed, 3D printed, and built a GRBL-based CNC laser cutter/engraver from scratch. CAD, electronics, and sample engravings included.
View Project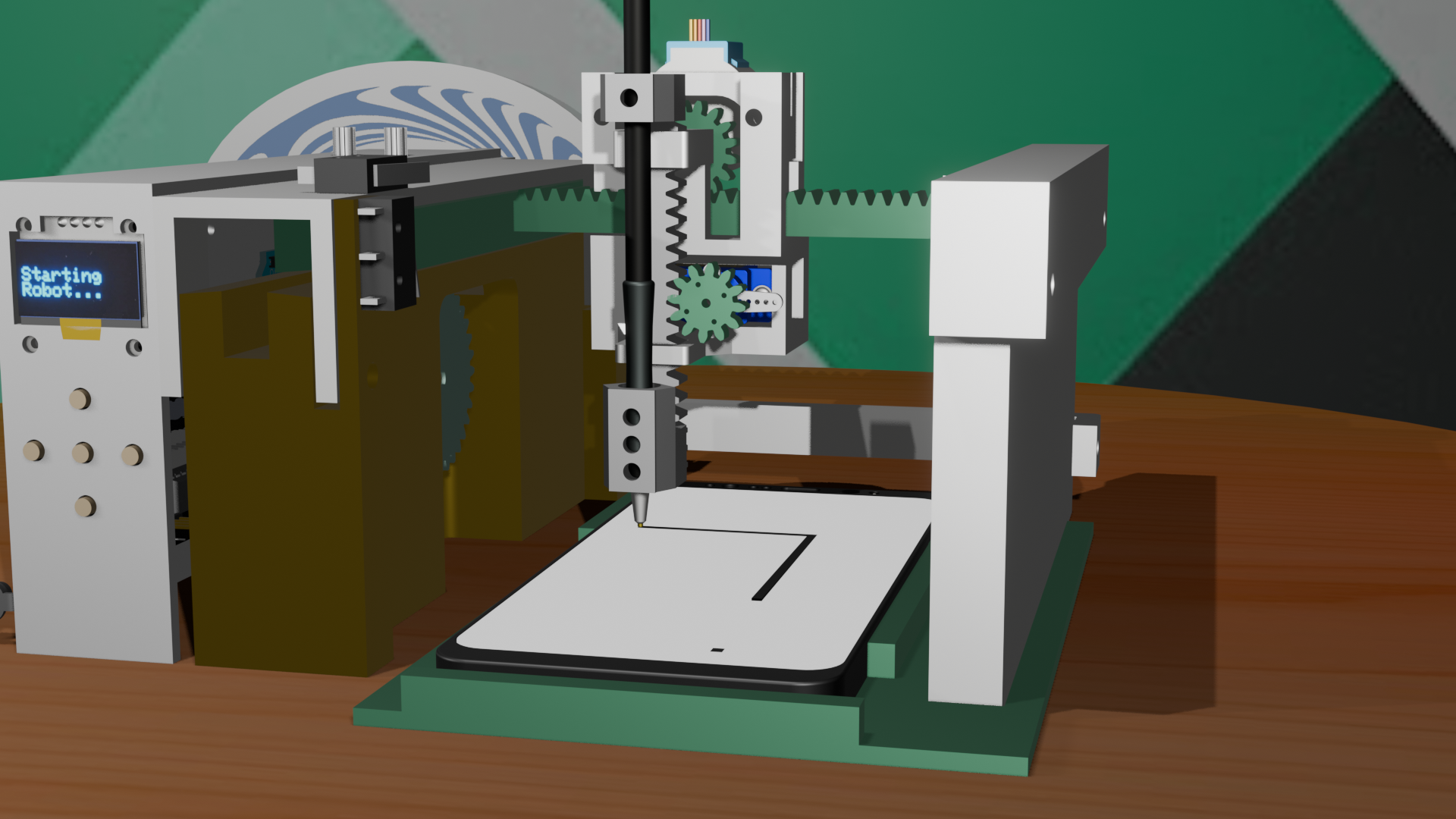
3-Axis Cartesian Robot
Design of a custom 3-axis CNC machine — mechanical design, electronics, and motion control software. Full CAD and documentation available.
View Project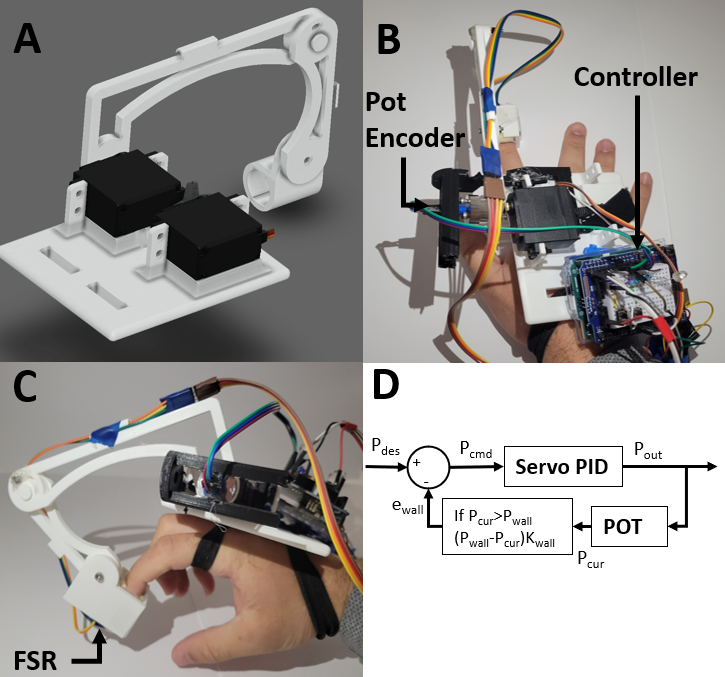
Haptic Glove — Virtual Wall
Wearable haptic glove using impedance control to simulate virtual wall contact on a finger. Servo bypass, FSR sensing, and embedded Arduino control.
View Project