Project Description
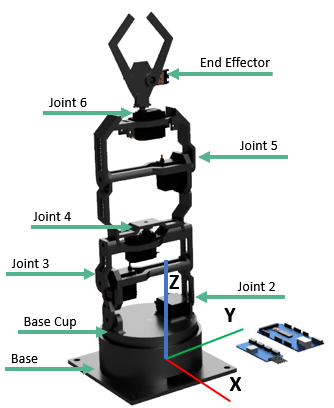
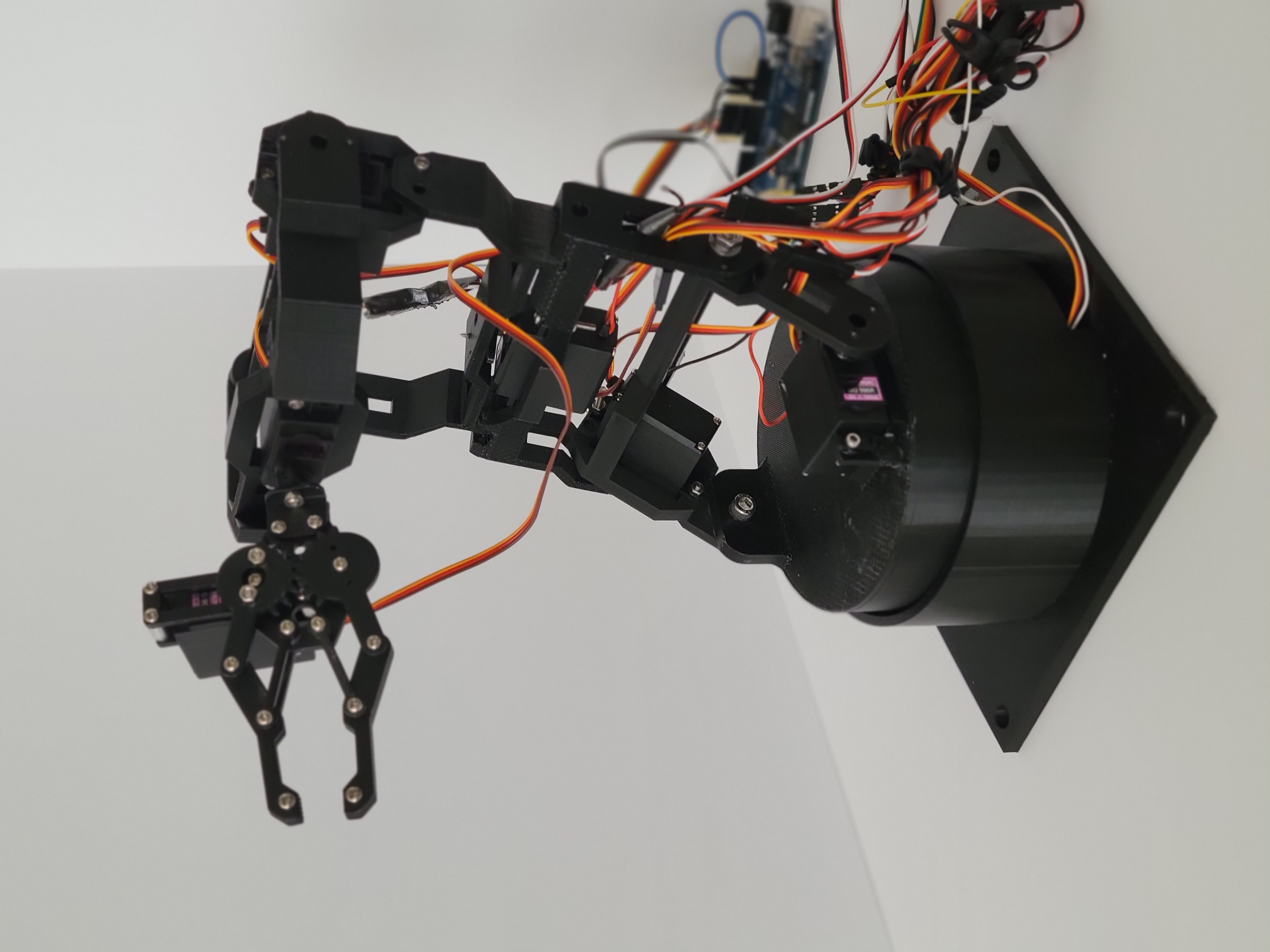
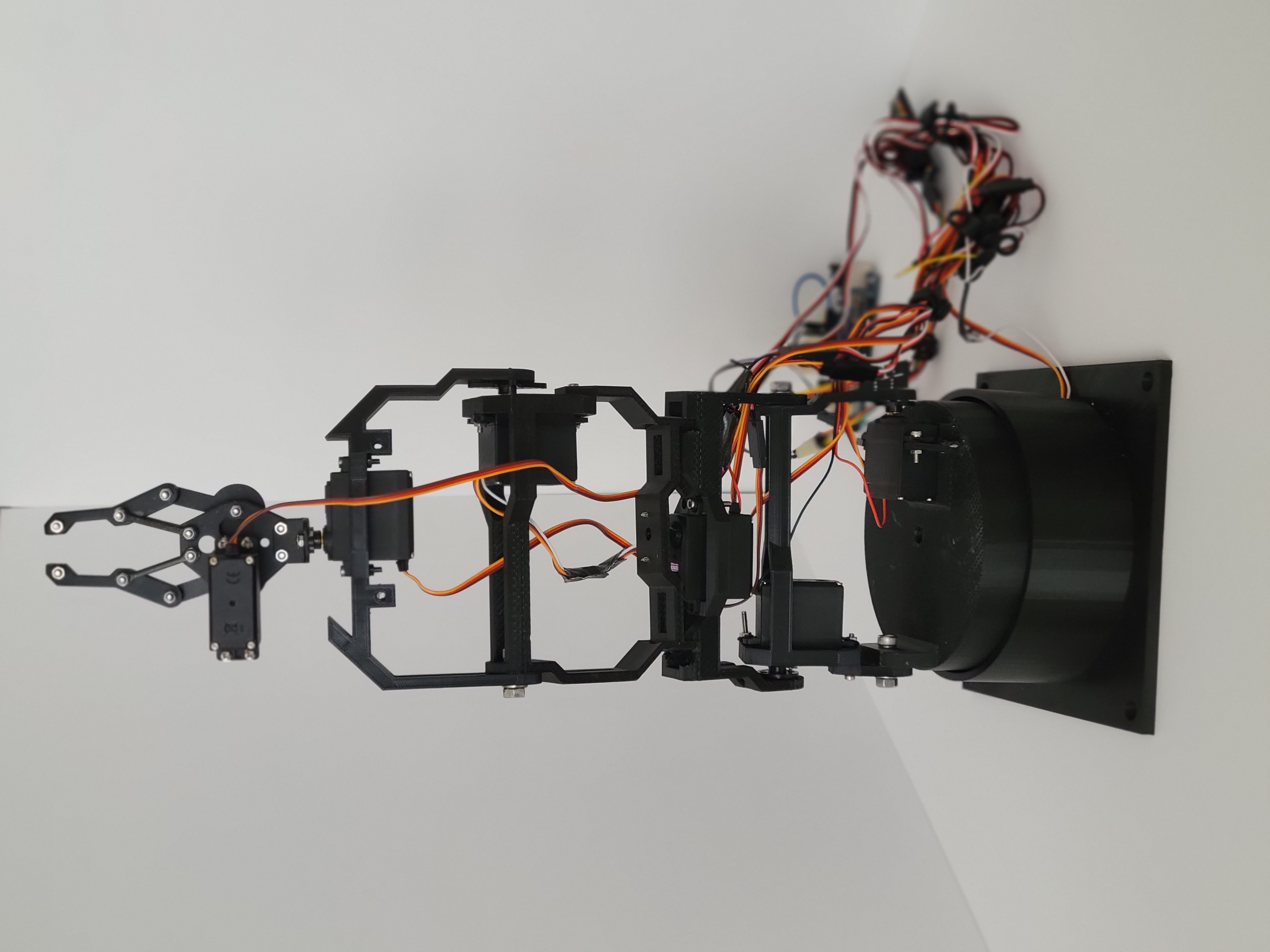
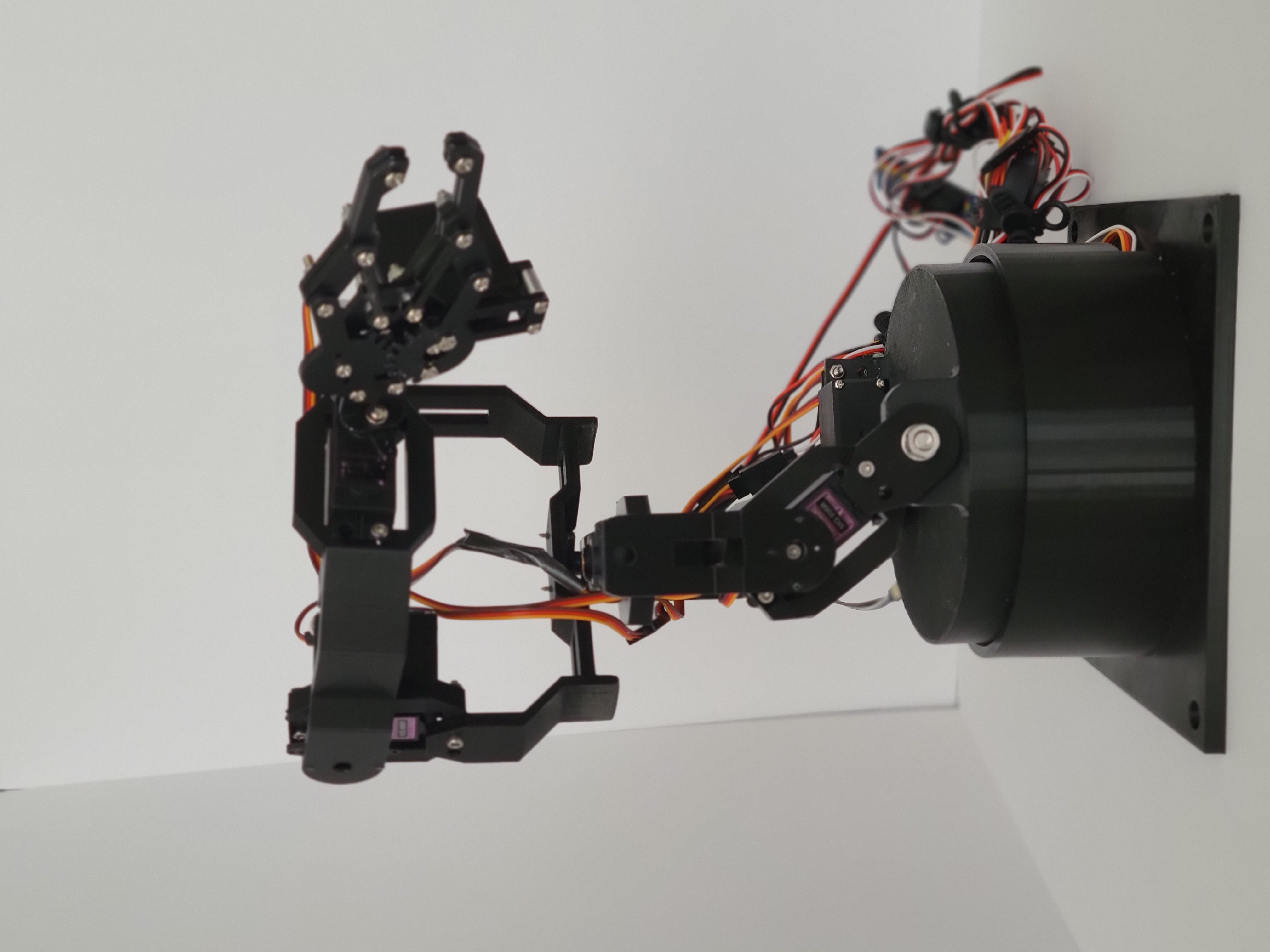
The purpose of this project was to create a fully functional 6 Degree of Freedom robot arm
like the common universal robots and others used in industry
on automated lines etc.
Traditionally, these robots perform fast paced, repeatable, and extremley accurate tasks to fulfill their purposes.
The robots must be precise, robust, and reliable enough to get the job done. With such a daunting set of requirements
it's no surprise that a high quality robot arm can cost more than $5,000 with many robots popularly used in industry being much more expensive than that.
I don't have that kind of pocket change for all the things I'd like to do with a robot arm, but I really
want to have an arm of my own to use around the house.
Therefore my project goal was to see how good of a robot arm I could make with limited funds, time, and resources that mimics the function of an industrial robot as much as I can.

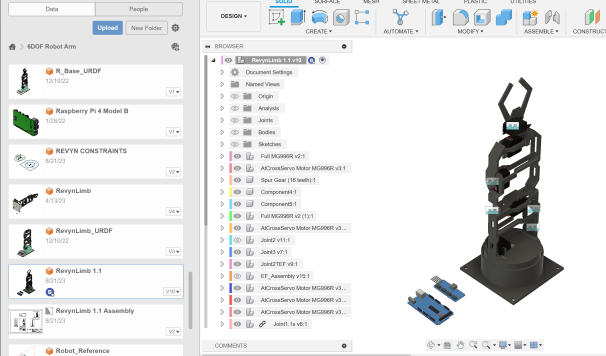
The first steps were to set a budget, time-frame, and outline some clear requirements for my project. I decided I could allot about $300 for the hardware and give myself 1 month with the first portion of the month dedicated to the CAD design and schematics and the later half to control. A more detailed compilation of the purpose, deliverables, and project schedule can be found here in my Project Organization documentation. A few decisions were made to simplify the process and keep things cheaper. With my background in mechancial engineering, I am comfortable 3D modeling all the custom parts I might need. I have an Ender 3 3D printer and will make the parts using that. I can also control the robot using an Arduino Mega 2560 and PCA9685 that I have laying around (I will factor these parts and materials into the cost). I will program the Arduino in C code, and then use MATLAB to send serial commands with joint variables to move the robot. In the future I may create python scripts that mimic the MATLAB ones. To summarize my approach, I have created a small functional requirements table below.